Mechatronics Mars Rover Project
It’s Flippin’ Awesome
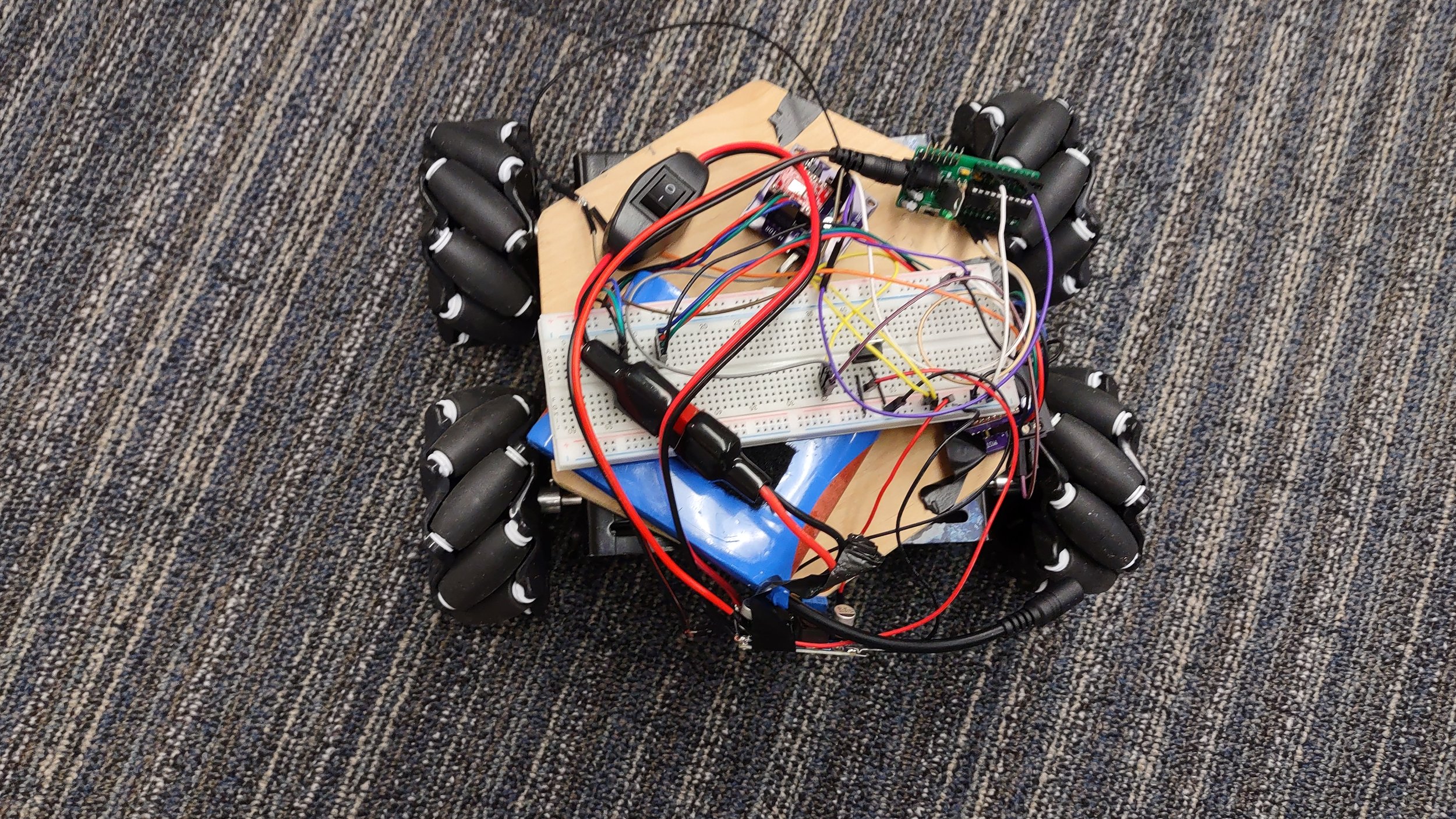
As Part of our Mechatronics curriculum, we were assigned to design, build, and program a robot to simulate a Mars Rover expedition. Using Microchip PIC24FV32KA304 microcontrollers, we created a machine very capable of accomplishing the tasks ahead. With a team name originating from our favorite movie, we were ready to work.
Tasks for our robot included line following, ball sample collection and sorting, canyon navigation, equipment servicing, and satellite locating for data (laser) transmission. I acted primarily as mechanical designer, fabricator, and final video editor, but we all worked together to program and debug our robot named Tina.